


액세스 :메뉴바에서, View > rayCloud를 클릭해 레이 클라우드를 엽니다. Sidebar가 메인 화면 우측에 표시됩니다.
• 3D View에 포인트 클라우드 밀집 영역이 선택되었을 때 포인트 클라우드 밀집 영역이 표시됩니다.
 경고
경고
- • 이미지에 커버되지 않은 영역을 포함하지 않는 것을 권장합니다. : 해당 영역의 결과가 정확하지 않을 것이며 커버 영역의 결과에 영향을 미칠 수 있습니다.
- • 스텝 2. 포인트 클라우드 밀집화가 완료된 후 포인트 클라우드 밀집 영역이 정의되었을 때, 레이 클라우드의 3D 뷰에 보이는 포인트 클라우드만 영향을 미치며 디스크에 결과가 저장되지 않습니다.
디스크에 변경 사항을 저장하는 방법으로 두 가지가 있습니다. :
- • Process > Options.. > Point Cloud의 Point Cloud Filters 섹션에서, Use Densification Area 체크박스를 선택한 후 스텝 2. 포인트 클라우드 밀집화를 프로세싱 하십시오. 밀집화된 포인트 클라우드는 포인트 클라우드 밀집 영역을 고려하여 생성됩니다. 이 작업은 스텝 2. 포인트 클라우드 밀집화의 에서 이전에 생성된 파일을 덮어 씁니다.
- • 밀집화 포인트 클라우드를 우클릭 후 Export Point Cloud…를 클릭하십시오. Export point cloud에서 형식과 포인트 클라우드가 저장될 경로를 선택 후 OK를 클릭하십시오.
- • 포인트 클라우드 밀집 영역은 레이 클라우드의 3D 포인트에 있는 자동 타이 포인트에 영향을 미칩니다. 이것은 스텝 1. 초기 프로세싱의 결과에 영향을 미치지 않습니다.
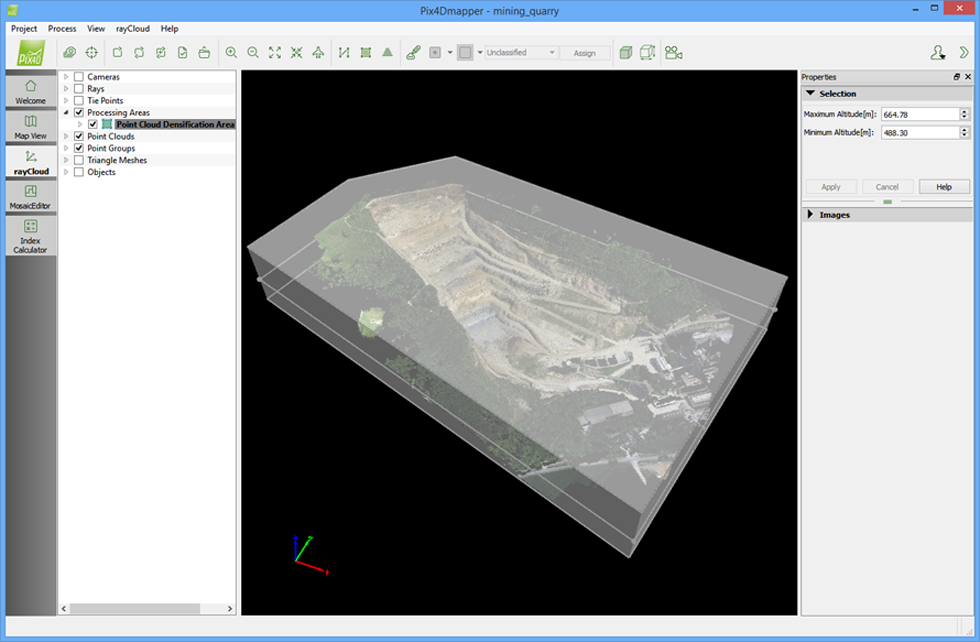
- • Maximum Altitude[units] : 포인트 클라우드 밀집 영역의 상단 면의 고도
- • Minimum Altitude[units] : 포인트 클라우드 밀집 영역의 하단 면의 고도
 중요 : 최대 고도는 최소 고도보다 높아야 합니다.
중요 : 최대 고도는 최소 고도보다 높아야 합니다.
참조 : 최대 고도와 최소 고도는 편집할 수 있습니다. :
• text박스 선택 후
- • Page Up/Page Down 키 클릭 : 10단위로 값을 증가/감소 합니다.
- • Up/Down 화살표 클릭 : 1단위로 값을 증가/감소 합니다.
- • Up/Down 화살표 텍스트 박스 버튼 클릭 : 1단위로 값을 증가/감소 합니다.
- • 텍스트 박스에 새로운 값을 입력
아래의 정보에는 두 개의 버튼이 있습니다. 기본적으로 회색으로 표시되며, 최소 또는 최대 값이 수정되면 사용 가능 합니다.
- • Apply : 최소/최대 고도의 값에 대한 새로운 값을 저장하고 새로운 필터를 적용합니다.
- • Cancel : 최소/최대 고도에 대한 새로운 값을 저장하지 않습니다.
- • Help : Pix4Dmapper 도움말을 엽니다.

회사정보
회사명 : (주)헬셀 | 대표 : 장성기 주소 : 12925 경기도 하남시 미사대로 520 (덕풍동) 현대지식산업센터한강미사2차 D동 324호
사업자등록번호 : 241-81-00240 | 통신판매신고번호 : 2022-경기하남-0452
개인정보관리책임자 : 장성기 (rickychang@helsel.co.kr)
사업자등록번호 : 241-81-00240 | 통신판매신고번호 : 2022-경기하남-0452
개인정보관리책임자 : 장성기 (rickychang@helsel.co.kr)