
카메라 내부 및 외부 파라미터는 어떻게 정의하나요?
1. 카메라 외부 파라미터
2. 3D에서 2D로 : 카메라 내부 파라미터
2.1 관점 렌즈
2.1.1 왜곡 모델이 없는 카메라
2.1.2 왜곡 모델이 있는 카메라
2.2 어안 렌즈
3. 카메라 조작 외부 매개 변수
- 1. 카메라 외부 파라미터
외부 카메라 매개 변수는 각 이미지 마다 다릅니다. 다음 식에 의해 주어집니다.:
- • T = (TX, TY, TZ) 국제 좌표계의 카메라 투영 중심 위치.
- • R = φ, κ, ω각도와 카메라 방향으로 정의하는 회전 행렬 (PATB 규칙)
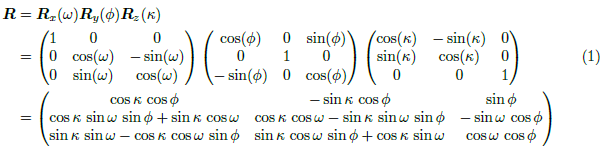
X=(X, Y, Z)가 국제 좌표계에서 3D 포인트인 경우, 카메라 좌표계에 X'=(X', Y ', Z')위치가 주어집니다. :
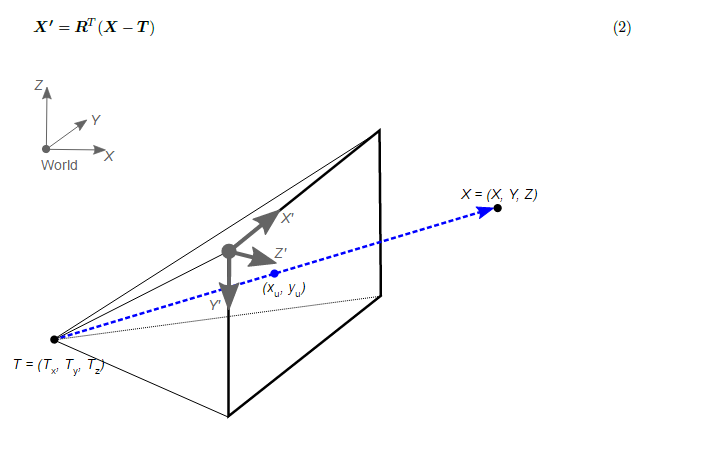
그림 1. 외부 카메라의 3D 기하학 구조
- 2. 3D에서 2D로 :카메라 내부 파라미터
- 2.1 관점 렌즈
- 2.1.1 왜곡 모델이 없는 카메라
-
왜곡 모델이 없는 3D 포인트 투영의 픽셀좌표(xu, yu)는 다음과 같이 주어집니다.

여기서 F는 픽셀의 초점거리이고, 픽셀 좌표계의 주점 (cx, cy)입니다.
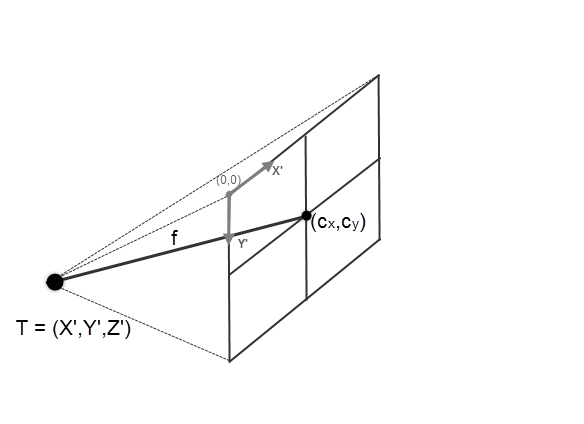
그림 2. 왜곡없는 투영 카메라의 기하학 구조
- 2.1.2 왜곡 모델이 있는 카메라
-
보기 :

동등한 포인트가 되기 위해 :

광학 중심으로부터의 2D 반경, R1, R2, R3 반경과 T1, T2 접선 왜곡 계수. 카메라의 좌표시스템(xhd, thd)의 왜곡 균일 포인트는 다음과 같이 주어집니다 .

왜곡 모델이 없는 투영 카메라의 픽셀 좌표(xd, yd)는 다음과 같이 주어집니다.

여기서 F는 픽셀의 초점거리이고, 픽셀 좌표계의 주점 (cx, cy)입니다.
- 2.2 어안 렌즈
-
어안 렌즈에 대한 왜곡은 다음과 같이 정의됩니다. :
- • 픽셀 좌표계에서 계산 이미지의 변형을 묘사하는 C, D, E, F 변수. 인척 행렬의 대각선 요소는 초점거리 f와 관련될 수 있습니다.

대부분의 경우 회전 타원체 오프-대각선 요소는 투영된 이미지 주심의 왜곡에 연결됩니다.
- • 다항식의 P0 , P1 , P2 , P3 , P4 계수 :
- • 장소 :
- • 그리고 :



어안렌즈 왜곡 모델에 투영된 3D 포인트의 픽셀 좌표(xd, yd)는 다음과 같이 주어집니다.
- • 다항식의 P0 , P1 , P2 , P3 , P4 계수 :
- • 장소 :


(xc, yc)는 픽셀 좌표의 주요 포인트입니다.

예시 :
8mm 시그마 렌즈를 사용할 때 (.도 3) 5472 X 3648 화소의 6D 캐논 카메라에 8mm 시그마 렌즈를 사용할 때, 내부 파라미터는 다음과 같이 초기화 될 수있다 :
- • (cx , xy) = (5472/2, 3648/2) 투영된 이미지의 원의 중심이다
- • P0 = P2 = P3 = P4 = 0
- • P 1 = 1
- • C = F = 1780 화소는 이미지 원의 반경
- • E = D = 0
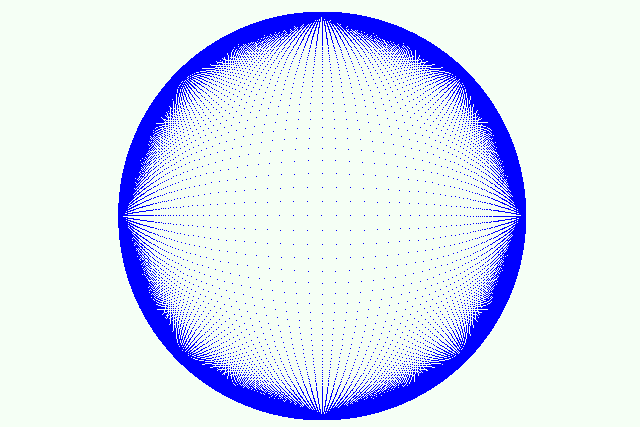
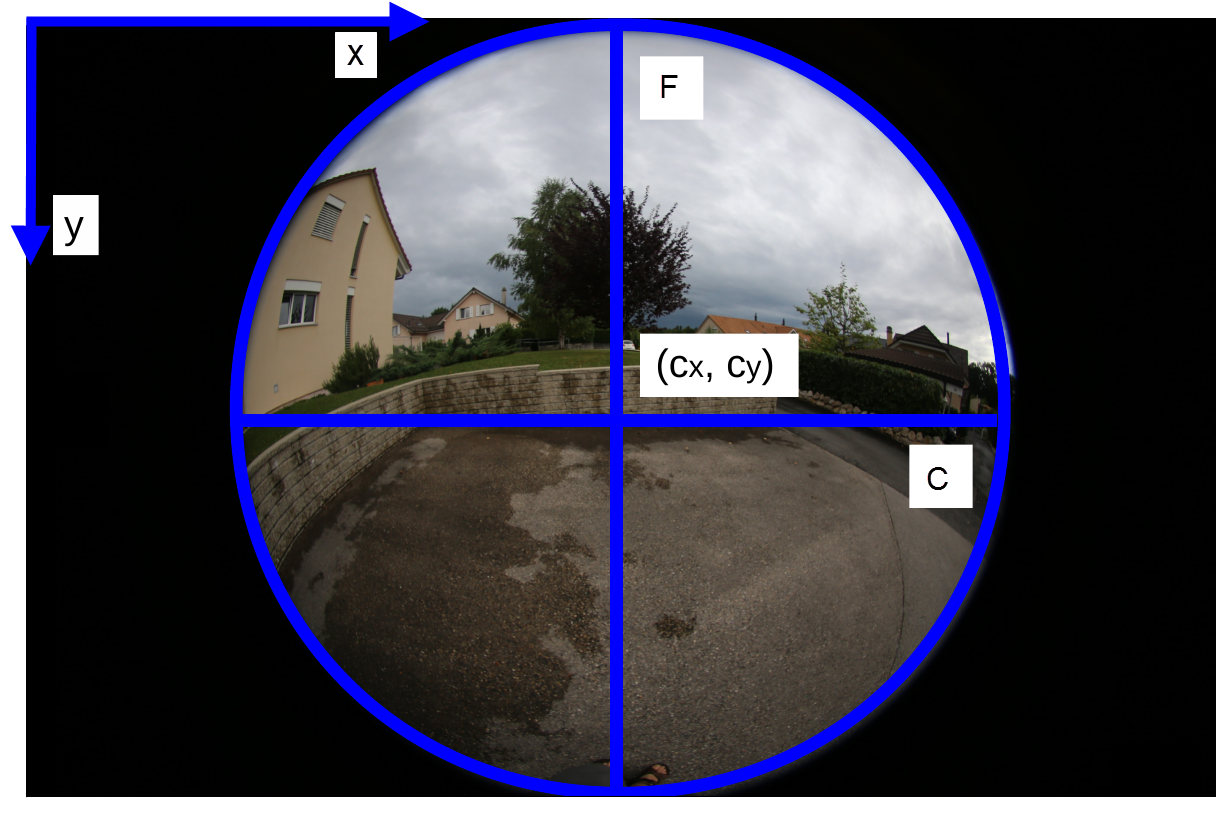
그림 3. 캐논 6D에 8mm 시그마 렌즈의 왜곡.
- 3. 카메라 조작 외부 매개 변수
-
카메라 장비는 기하학 통제로 서로 연결되어 있는 다수의 카메라들로 구성되어 있습니다. 카메라 장비는 다음과 같은 특징이 있습니다.
- • 하나의 카메라는 국제 좌표계로 주어진 위치(Tm)와 방향Rm을 참조합니다.
- • 다른 모든 카메라는 국제 좌표계의 Ts위치와 Rs 방향을 가진 보조카메라입니다.

카메라 기준 좌표계에 표시 되는 3D 포인트 X'의 위치는 다음과 같이 주어집니다.

보조 카메라 기준 좌표계에 표시되는 3D 포인트 X'의 위치는 다음과 같이 주어집니다.

카메라 좌표계의의 3D 포인트 좌표를 한번 계산하면, 투영작업은 2단계와 동일한 망법으로 만들어 집니다.
