
지원 > 지식기반 | Knowledge Base > 사용 방법(단계별 지침)
rayCloud로 대상을 출력하는 방법
- step 1. Initial Processing 동안 이미지가 칼리브레이트 되지 않았을 때, rayCloud를 사용해 수동으로 칼리브레이트 합니다.
-
참고 : 수동 칼리브레이션은 적은 양의 이미지를 위해 되어야 합니다. 수동적으로 많은 이미지를 칼리브레이트하는 절차는 시간 소모적일수 있고 권장되지 않습니다. 만약 많은 이미지들이 자동적으로 칼리브레이트되지 않는다면, 문제의 원인을 찾는 것이 낫습니다: 202558689.
- 이미지를 칼리브레이트하기 위해, 이미지의 충분한 핵심이 다른 이미지와 맞아 떨어질 필요가 있습니다.
- 하나의 칼리브레이트 되지 않은 이미지는 찾아진 다른 이미지와 매치되지 않았기 때문이거나 정확하게 매치가 되지 않았기 때문입니다.
- 그래서, 이 이미지들을 칼리브레이트하기 위해서, 그것과 수동으로 칼리브레이트된 이미지사이에 새롭게 매치하기 위해 수동으로 규정될 필요가 있습니다.
-
수동으로 카메라를 칼리브레이트하기 위해서:
- 1. 메뉴 바에서, View > rayCloud를 클릭합니다.
- 2. 3D 뷰에서 칼리브레이트 되지 않은 카메라를 선택합니다.
-
3. 사이드 바에서, Selection 영역에서, 선택된 카메라와 상응하는 포인트가 이미지에 다음과 같이 표시됩니다:
- • 붉은 십자가: 다른 이미지의 키포인트와 매치되지 않는 자동 키포인트
- • 오렌지 십자가: 다른 이미지와 매우 정확하게 매치될 것 같은 자동 키포인트
- • 노란 십자가: 선택된 이미지에 표시된 GCPs, 체크 포인트나 매뉴얼 타이 포인트가 Inliners에 고려됩니다.
- • 핑크 십자가: GCPs, 체크 포인트와 매뉴얼 타이 포인트를 선택된 이미지에 표시하지만 outliners로 고려합니다.(Inliners가 아니라)
- 타이 포인트 영역은 선택된 카메라에 표시된 모든 타이 포인트에 표시됩니다.
-
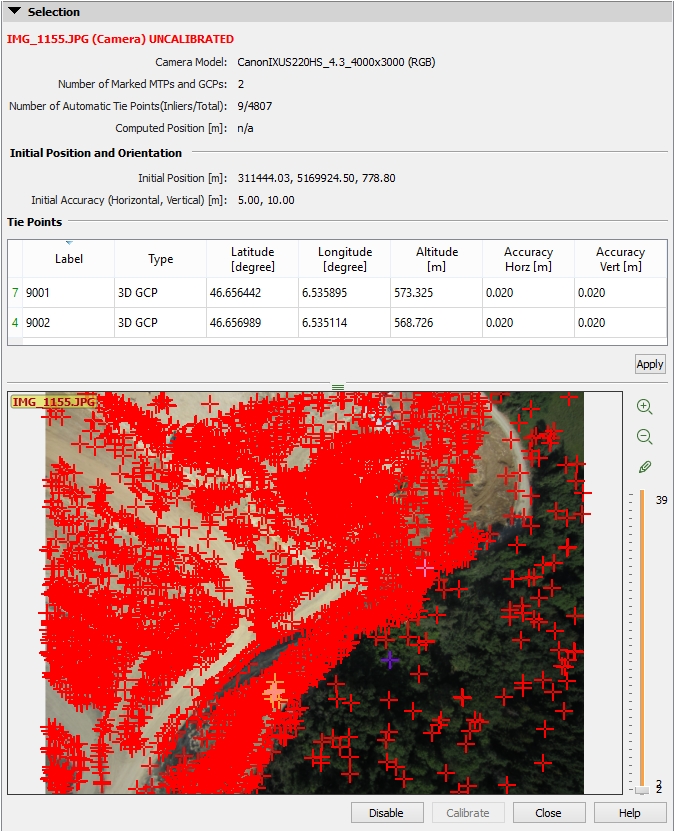
- 4. 붉은색이나 오렌지 십자표에 더블 클릭합니다. 선택된 십자표가 보라색이 됩니다.
-
참고 : 같은 영역에 위치한 것보다 포인트를 잘 분배된 이미지에 사용하는 것이 권장됩니다.
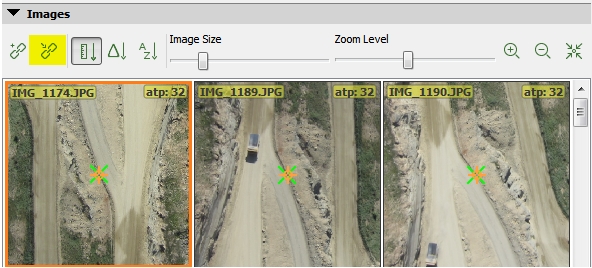
- 5. 각 붉은색과 오렌지 키포인트는 키포인트가 속해 있을 높은 가능성이 있는 3D 포인트와 연관되어 있습니다. 이미지 영역은 연관된 3D포인트를 사용해 포인트가 시각화 될 곳의 이미지 리스트에 표시됩니다. 이 키포인트는 오렌지 원의 오렌지 십자표를 사용하여 표시됩니다. 이러한 이미지에서 3D 포인트의 반영은 녹색 십자표로 표시됩니다.
-
만약 제안된 포인트가 좋다면, 즉 만약 칼리브레이트 되지 않은 카메라에 있는 키포인트에 상응한다면, 이 키포인트는 Connect to tie point
 버튼을 누름으로써 그러한 이미지로 매치될 수 있습니다. 이것은 표시된 이미지를 사용해 새로운 매뉴얼 타이 포인트를 생성합니다.
버튼을 누름으로써 그러한 이미지로 매치될 수 있습니다. 이것은 표시된 이미지를 사용해 새로운 매뉴얼 타이 포인트를 생성합니다.
-
-
팁 : 포인트가 보일 수 있는 더 높은 수의 이미지는 더 쉽게 매치를 유효하게 합니다. 키포인트가 보이는 이미지의 최소수를 변경하기 위해 칼리브레이트 되지 않은 이미지의 오른쪽 슬라이더를 사용합니다. 오직 키포인트가 칼리브레이트 되지 않은 선택된 이미지의 수에 나타납니다.
- 6. 각 시간에 매치가 추가되고, 카메라 위치가 다시 측정됩니다. 이 새로운 위치는 기존 3D 포인트를 선택된 이미지로 투영하는데 사용됩니다. 만약 이러한 투영된 3D 포인트와 기존 키포인트 사이의 재투영 오류가 낮다면, 키포인트가 정확하게 되고 Inliner로 불립니다. 이러한 inliners는 오렌지 십자표로 표시됩니다.
-
7. 다른 기존 포인트(적어도 3개)에 연결하고/또는 새로운 매뉴얼 타이 포인트
 로 규정합니다.(적어도 3개)
로 규정합니다.(적어도 3개)
-
중요 : 매뉴얼 타이 포인트는 칼리브레이트 되지 않은 이미지와 적어도 2개의 칼리브레이트 된 이미지에 표시되어야 합니다. 칼리브레이트 된 이미지에만 표시되어선 안됩니다.
- 8. Calibrate를 눌러서 카메라를 칼리브레이트 합니다.
-
중요 : Calibrate 버튼은 다음에 가능합니다.
- • 이미지는 적어도 20 inliers를 가져야 합니다.
- • 모든 수동적으로 표시된 포인트(MTPs)는 inliers입니다.
- 9. 만약 새로운 카메라 위치와 방위가 좋다면, Process > Rematch and Optimize를 클릭합니다.
