


액세스 :메뉴바에서, View > Map View를 클릭하여 맵 뷰를 여십시오. 프로젝트 서머리는 메인 화면의 오른쪽에 표시됩니다.
참조 :사이드바 디스플레이에서 가능한 것에 관한 자세한 정보는 다음을 참조하십시오. : : 202558389
프로젝트 서머리의 좌측에는 서머리를 클릭하여 보기/숨기기를 할 수 있습니다.
-
 : 기본적으로 프로젝트 서머리가 보입니다.
: 기본적으로 프로젝트 서머리가 보입니다.-
 : 프로젝트 서머리가 보이지 않습니다.
: 프로젝트 서머리가 보이지 않습니다.프로젝트 서머리는 네 개의 섹션이 있습니다.
- Project
- Local processing
- Images
- Ground Control Points
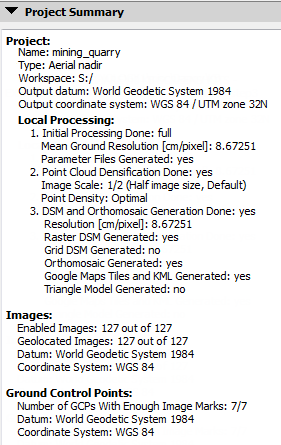
Project
해당 섹션은 프로젝트에 대한 일반 정보를 표시합니다.
- Name : 프로젝트의 이름
- Type : 프로젝트의 유형(공중 나딜, 대체 처리 모드, 공중 오블리크 혹은 지상파)
- Workspace : .p4d 프로젝트 파일이 위치하고 출력 폴더가 저장될 경로
- Output Datum : 출력의 데이텀
- Output Coordinate System : 출력의 좌표 시스템
참조 :지역 정보가 프로젝트에 주어지지 않을 경우(위치 정보가 없는 이미지 및 GCP가 없거나 혹은 위치 정보가 없는 이미지와 로컬 좌표 시스템 내의 GCP), 이후 출력 좌표 시스템은 로컬로 설정되며 데이텀이 표시됩니다.
- 출력 좌표 시스템 : 로컬
- 출력 좌표 시스템 : 로컬
Local Processing
해당 섹션에서는 로컬 프로세싱의 3단계의 진행 상황을 설명합니다. :| Step (1) : Initial Processing |
|
Initial Processing Done : |
| Step (2) : Point Cloud Densification |
| Point Cloud Densification Done : - No : Point Cloud Densification이 완료되지 않은 경우 - Yes : Point Cloud Densification이 완료된 경우 Image Scale : 추가적 3D 포인트가 계산되는 이미지의 크기 - : Point Cloud Densification이 완료되지 않은 경우 - 1/2 (절반 이미지 크기, 기본) : 절반 이미지는 추가된 3D 포인트를 계산하기 위해 사용됩니다. - 1 (원본 이미지 사이즈, 느림) : 원본 이미지 크기는 추가된 3D 포인트를 계산하기 위해 사용됩니다. - 1/4 (1/4 이미지 사이즈, 빠름) : 1/4 이미지 크기는 추가된 3D 포인트를 계산하기 위해 사용됩니다. - 1/8 (1/8 이미지 사이즈, 매우 빠름) : 1/8 이미지 크기는 추가된 3D 포인트를 계산하기 위해 사용됩니다. Point Density : - Optimal : 최적의 포인트 밀도를 계산합니다. - High : 높은 포인트 밀도를 계산합니다. 프로세싱 시간이 증가합니다. - Low : 낮은 포인트 밀도를 계산합니다. 프로세싱 시간이 감소합니다. |
| Step (3) : DSM and Orthomosaic Generation |
| DSM and Orthomosaic Generation Done : - No : DSM 및 오르도 모자이크 생성 단계가 완료되지 않은 경우 - Yes : DSM 및 오르도 모자이크 생성 단계가 완료된 경우 Resolution [cm/pixel] : - : DSM 및 오르도 모자이크 생성 단계가 완료되지 않은 경우 - “Number” : 만약 초기 프로세싱이 완료된 경우, “넘버”는 DSM 및 오르도 지상 해상도입니다. Raster DSM Generated : - No : DSM GeoTIFF 파일이 생성되지 않았을 경우 - Yes : DSM GeoTIFF 파일이 생성된 경우 Grid DSM Generated : - No : Grid DSM GeoTIFF 파일이 생성되지 않은 경우 - Yes : Grid DSM GeoTIFF 파일이 생성된 경우 Orthomosaic Generated : - No : 오르도 모자이크 GeoTIFF 파일이 생성되지 않은 경우 - Yes : 오르도 모자이크 GeoTIFF 파일이 생성된 경우 Google Maps Tiles and KML generated - No : 오르도 모자이크를 위한 구글 맵 타일 및 KML 파일이 생성되지 않은 경우 - Yes : 오르도 모자이크를 위한 구글 맵 타일 및 KML 파일이 생성된 경우 |
Images
해당 섹션은 프로젝트의 이미지에 관련된 정보를 표시합니다.
- Enabled Images : 초기 프로세싱에 사용될 이미지의 개수
- Geolocated Images : 위치 정보를 포함할 이미지의 개수
- Datum : 이미지 위치 정보의 데이텀
- Coordinate System : 이미지 위치 정보의 좌표 시스템
참조 :이미지가 위치 정보를 가지지 않거나 로컬 좌표 시스템에 주어지면, 좌표 시스템은 로컬로 설정되며 데이텀이 표시되지 않습니다.
- Coordinate System : 로컬
- Coordinate System : 로컬
Ground Control Points
해당 섹션에서는 프로젝트의 GCPs에 관한 정보를 표시하며 GCPs가 정의된 경우에만 표시됩니다
- Number of GCPs With Enough Image Marks : 최소한 두 개의 이미지의 GCP의 개수와 GCP의 총 개수
- Datum : GCPs의 데이텀
- Coordinate System : GCPs의 좌표 시스템
참조 :이미지가 위치 정보를 가지지 않거나 로컬 좌표 시스템에 주어지면, 좌표 시스템은 로컬로 설정되며 데이텀이 표시되지 않습니다.
- Coordinate System : 로컬
- Coordinate System : 로컬
중요 :충분한 이미지 포인트가 있는 3개 미만의 GCPs가 있는 경우, 다음의 경고 메시지가 빨간 색으로 나타납니다.
