
지원 > 지식기반 | Knowledge Base > FAQ(자주 묻는 질문)
품질보고에서 GCP에러를 정의하는 방법
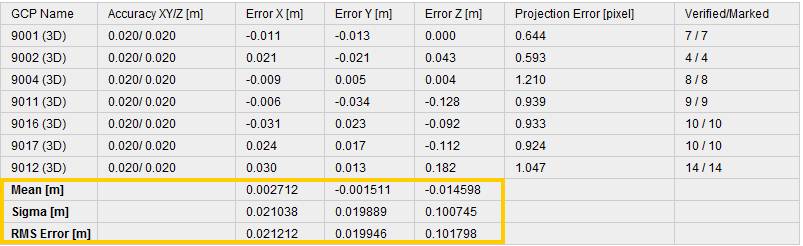
- Pix4Dmapper 품질 보고서는 GCP에 대한 다음과 같은 오류가 포함되어 있습니다 :
-
 참고 : 오류의 유닛은 GCP의 유닛과 동일합니다. (단위, m 또는 0.9144m)
참고 : 오류의 유닛은 GCP의 유닛과 동일합니다. (단위, m 또는 0.9144m)
-
-
Mean
-
주어진 방향 (X, Y 또는 Z)에 대해 평균은 다음과 같이 정의됩니다. :
- 평균 = μ = Σ (ei) / N
-
ei 위치 : 주어진 방향에 대한 각 에러
- N : GCP의 수
- 평균 Z 오류는 안좋은 GCP 습득에 대한 조직적인 오류를 인식하는 데 도움이됩니다.
-
 예제 : 모든 GCP의 Z에서 5cm의 조직적인 오류가 있는 경우, 평균 Z 오류는 5cm 될 것입니다.
예제 : 모든 GCP의 Z에서 5cm의 조직적인 오류가 있는 경우, 평균 Z 오류는 5cm 될 것입니다.
-
시그마
-
주어진 방향 (X, Y 또는 Z)에 대해 시그마는 다음과 같이 정의됩니다 :
- 시그마 = σ = sqrt(Σ (ei - μ) ^ 2) / N)
-
ei 위치 : 주어진 방향에 대한 각 지점의 오류
- μ : 주어진 방향에 대한 평균 오차
- N : GCP의 수
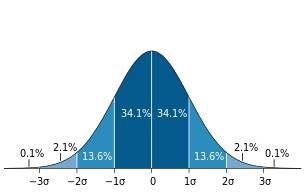
- 오류가 정규곡선이라고 가정한다면, 시그마 오차는 평균오차 주변에 신뢰구간을 형성합니다.
-
프로젝트의 68.2% 지점은 ±σ 오차를 가질 것입니다.
프로젝트의 95.4% 지점은 ±2σ 오차를 가질 것입니다.
프로젝트의 99.6% 지점은 ±3σ 오차를 가질 것입니다. -
-
예제 : 모든 GCP의 Z에서 5cm의 조직적인 오류가 있는 경우, 평균 Z 오류는 5cm가 될 것입니다. 시그마 Z 오류가 1cm라면, [5,7]구간에서의 오류 지점은 68.2%의 개연성을 가진다.
-
RMS
-
주어진 방향 (X, Y, Z)에 대해 RMS는 다음과 같이 정의된다 :
- RMS = sqrt(Σ (ei ^ 2) / N)
-
ei 위치 : 주어진 방향에 대한 각 지점의 오류
- N : GCP의 수
- RMS 오차는 조직적인 오류의 계정을 취할 것입니다. 평균오차=0일때, RMS 오류와 시그마 Z 오류는 동일하게 발생할것입니다. RMS 오류와 시그마 오류의 차이는 조직적인 오류를 나타냅니다.
- 3가지 지표 중, RMS오류는 평균과 분산 오차와 관계되기 때문에프로젝트에서 가장 대표적인 오차입니다.
-
예제 : 모든 GCP가 Z에서 5cm의 조직적인 오류를 가질 경우, 평균 Z 오류는 5cm 될 것입니다. 시그마 오류가 1cm일 경우(조직적 오류가 없다는 가정하에) 시그마 Z 오류는 프로젝트가 ±1cm, ±2cm, ±3cm에서 오류를 가질 가능성을 보여줍니다. RMS 오류는 조직적인 오류를 제거하지 않으면 5cm보다 커질 것입니다.
