
처리 옵션의 기본 템플릿
기본적으로 3D 지도가 선택되고, 다음의 처리 옵션 템플릿을 보여줍니다. :
- 처리 옵션 템플릿
- 3D지도
- 3D 모델
- AG 멀티 스펙트럼
- AG 수정 된 카메라
- AG RGB
- 3D지도 - 고속/저 해상도
- 3D모델 - 고속/저 해상도
- AG 수정 된 카메라 - 고속/저 해상도
- AG RGB - 고속/저 해상도
- 열화상 카메라
- 특성
- 3D 모델(포인트 클라우드, 3D 메쉬 질감) 뿐만 아니라 DSM과 오르소모자이크를 생성합니다. 일반적인 입력 : 공중 이미지는 격자 비행 계획을 사용하여 얻어집니다. 적용 예 : 채석장, 지적도 등
- 3D 모델(포인트 클라우드, 3D 메쉬 질감)을 생성합니다. 일반적인 입력 : 높은 중복의 모든 이미지 적용 예 : 건물, 개체, 지상 이미지, 실내 이미지, 검사 등의 3D 모델
- 반사율, 인덱스(NDVI), 분류, 응용지도를 생성합니다. 일반적인 입력 : 멀티 스펙트럼 카메라(세쿼이아, Micasense RedEdge, Multispec 4C 등)의 이미지 적용 예 : 정밀 농업
- 반사율, 인덱스(NDVI), 분류, 응용지도를 생성합니다.일반적인 입력 :수정 RGB 카메라 적용 예 : 정밀 농업
- 오르소모자이크를 생성합니다. 일반적인 입력 : 농업용 RGB 카메라 (Sequoia RGB) 적용 사례 : 디지털 정찰, 정밀 농업을 위한 요구 보고서
- 낮은 정확도와 낮은 해상도 출력으로 생성된 3D지도 탬플릿의 빠른 처리
- 낮은 정확도와 낮은 해상도 출력으로 생성된 3D모델 탬플릿의 빠른 처리
- 낮은 정확도와 낮은 해상도 출력으로 생성된 Ag 수정된 카메라 탬플릿의 빠른 처리
- 낮은 정확도와 낮은 해상도 출력으로 생성된 Ag RGB 탬플릿의 빠른 처리
- 열화상 반사율 맵을 생성합니다. 일반적인 입력 : 열화상 카메라 (Tau 2 기반: FLIR Vue Pro, thermoMAP, 등)적용 예 : 관개, 태양전지 패널 등

참고 :
 기본적으로 존재하는 처리 옵션 템플릿 참조.
기본적으로 존재하는 처리 옵션 템플릿 참조. 사용자가 생성한 처리 옵션 템플릿 참조.
사용자가 생성한 처리 옵션 템플릿 참조. 편집되었지만 저장되지 않은 처리 옵션 템플릿(기본적으로 존재하거나 사용자가 생성한) 참조.
편집되었지만 저장되지 않은 처리 옵션 템플릿(기본적으로 존재하거나 사용자가 생성한) 참조.
- 3D지도
-
3D 모델(포인트 클라우드, 3D 메쉬 질감) 뿐만 아니라 DSM과 오르소모자이크를 생성합니다.
입력 이미지
높은 중복과 격자 비행을 사용하여 획득 한 공중 이미지는 대부분 지상(천저 이미지)에 중심을 두고 있습니다.
출력

오르소모자이크
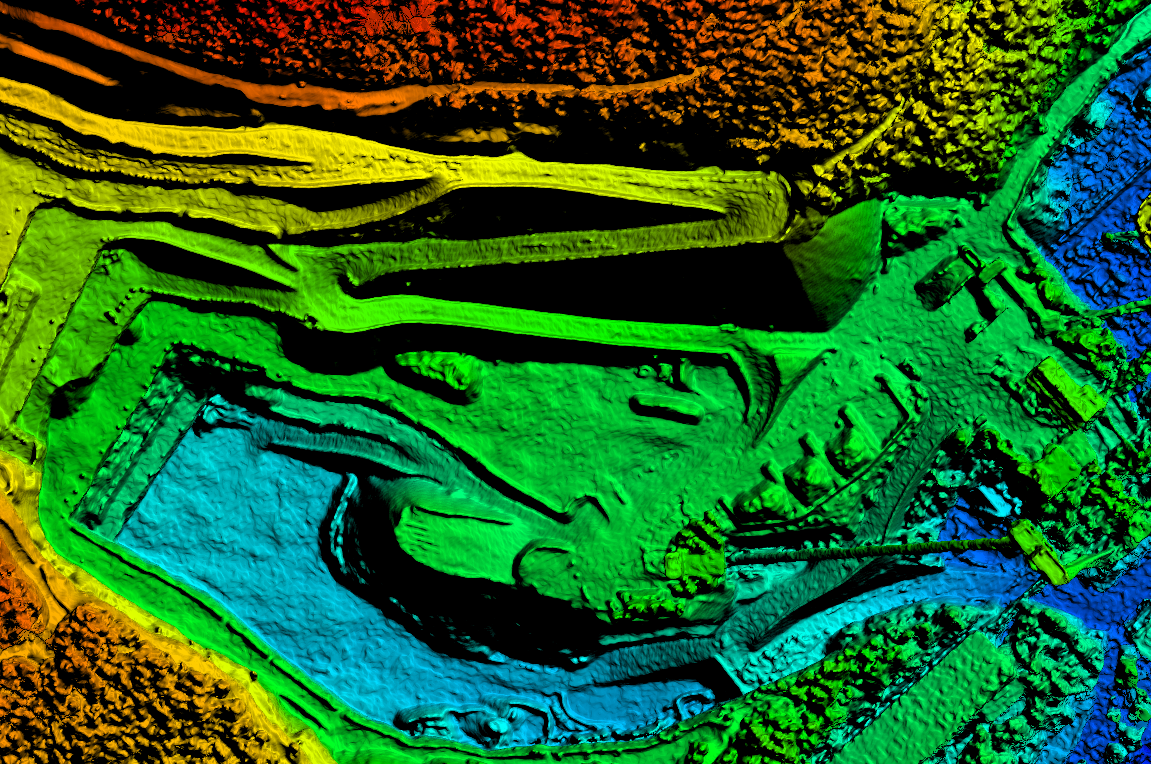
DSM
3D메쉬
포인트 클라우드
적용 사례
- • 부피 측정
- • 주택과 도로 디지털화
- • 등고선 생성
- • 글 지도 및 Mapbox 오버레이.
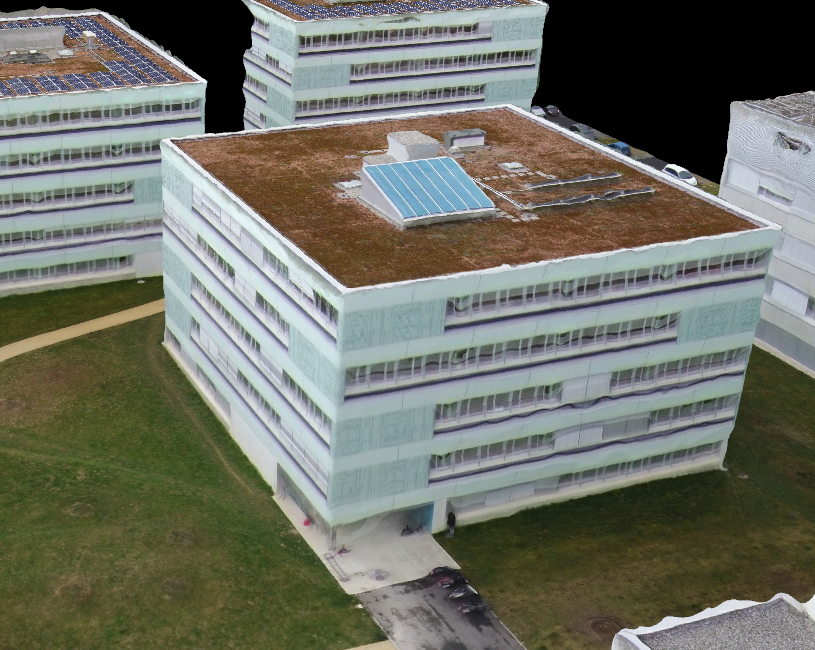
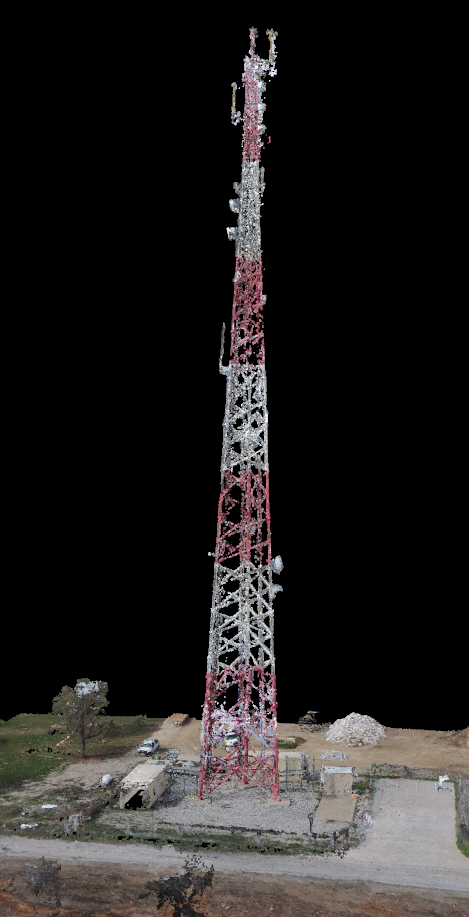
- 3D 모델
-
3D 모델(포인트 클라우드, 3D 메쉬 질감)을 생성합니다.
입력 이미지
지상 또는 완곡한 공중 이미지(자유 비행)으로부터 얻어진 이미지와 같이 높은 중첩의 모든 이미지
출력

3D 메쉬
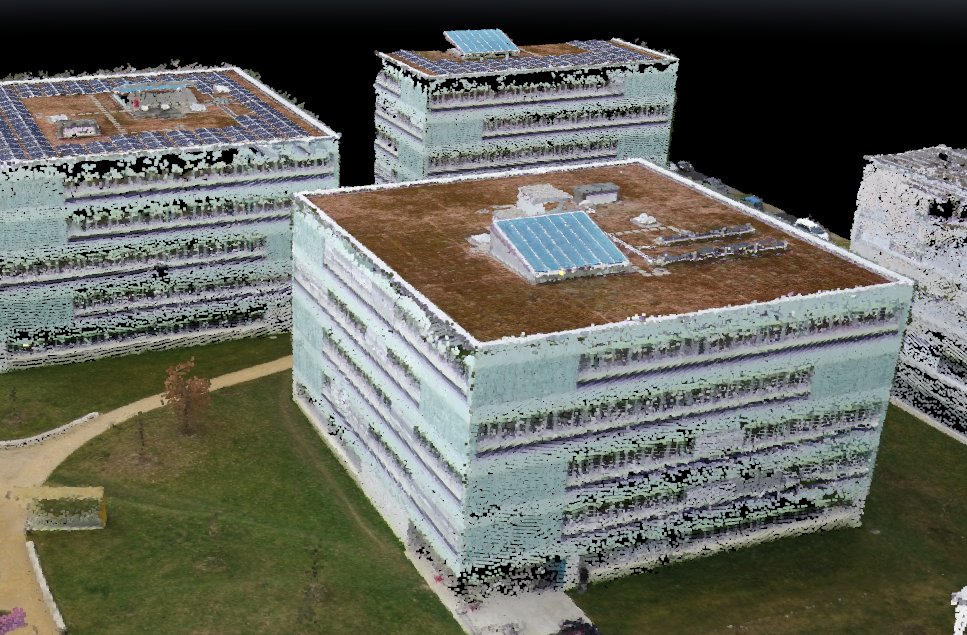
포인트 클라우드
포인트 클라우드
적용 사례
- • 건물, 동상, 개체 등 3D모델
- • 스크린에 비행 중 영상제공
- • 검사 관련 작업
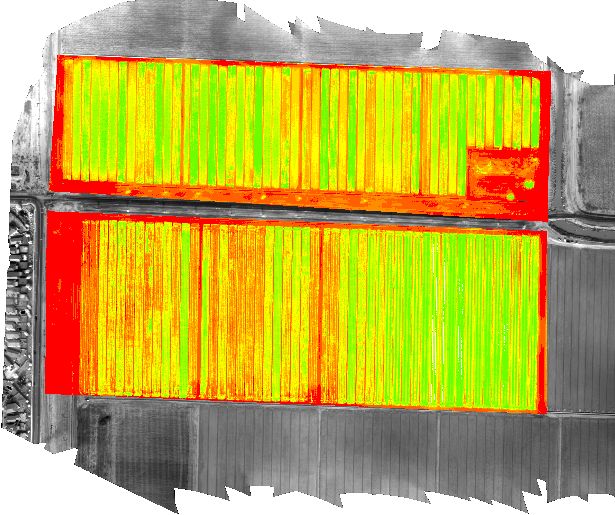
- AG 멀티 스펙트럼
-
정밀 농업에 대한 응용 지도와 방사성 정밀 반사율, 색인, 분류를 생성합니다.
입력 이미지
밴드 전용 센서 당 멀티 스펙트럼 카메라를 사용하여 격자 비행을 사용하여 얻어진 공중 이미지입니다. 호환 카메라의 예를 들면 :
- • Parrot Sequoia.
- • Micasense RedEdge.
- • Airinov Multispec.
출력
반사율 지도
색인지도(NCVI, NDRE 등)
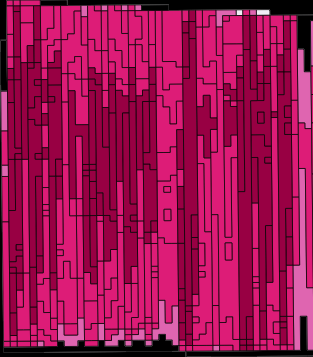
응용 지도
적용 사례
- • 건물, 동상, 개체 등 3D모델
- • 스크린에 비행 중 영상제공
- • 검사 관련 작업
- AG 수정 된 카메라
-
정밀 농업에 대한 응용지도, 반사율, 색인, 분류를 생성합니다.
입력 이미지
수정된 RGB 카메라를 사용하여 높은 중복의 격자 비행을 사용하여 얻어진 공중 이미지
출력
반사율 지도
색인지도(NCVI, NDRE 등)
응용 지도
적용 사례
- • 디지털 스카우트.
- • 정밀 농업.
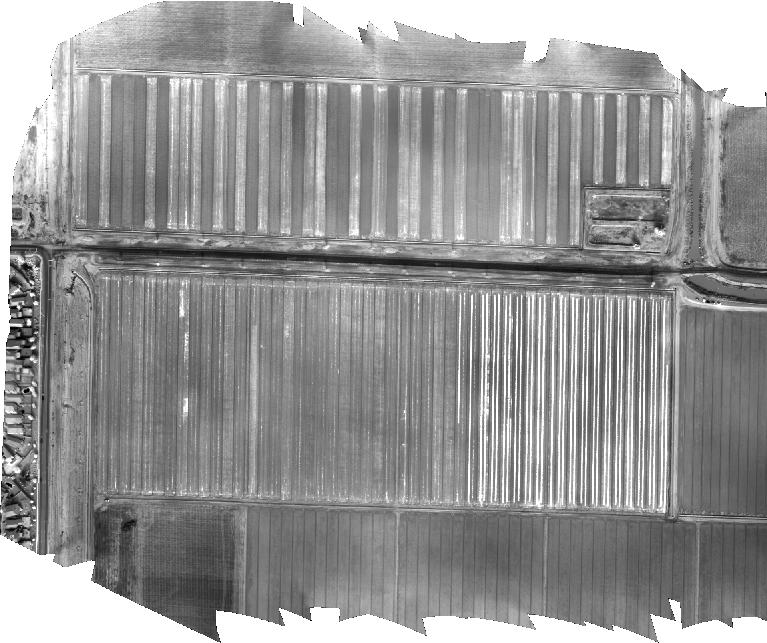
- AG는 RGB
-
정밀 농업에 대한 정확한 오르소모자이크를 생성합니다.
입력 이미지
Parrot Sepuoia RGB와 같은 농업용 RGB카메라를 사용하여 높은 중복의 격자 비행을 사용하여 얻어진 공중 이미지
출력

오르소모자이크
적용 예 :
- • 디지털 스카우팅
- • 요구 보고서
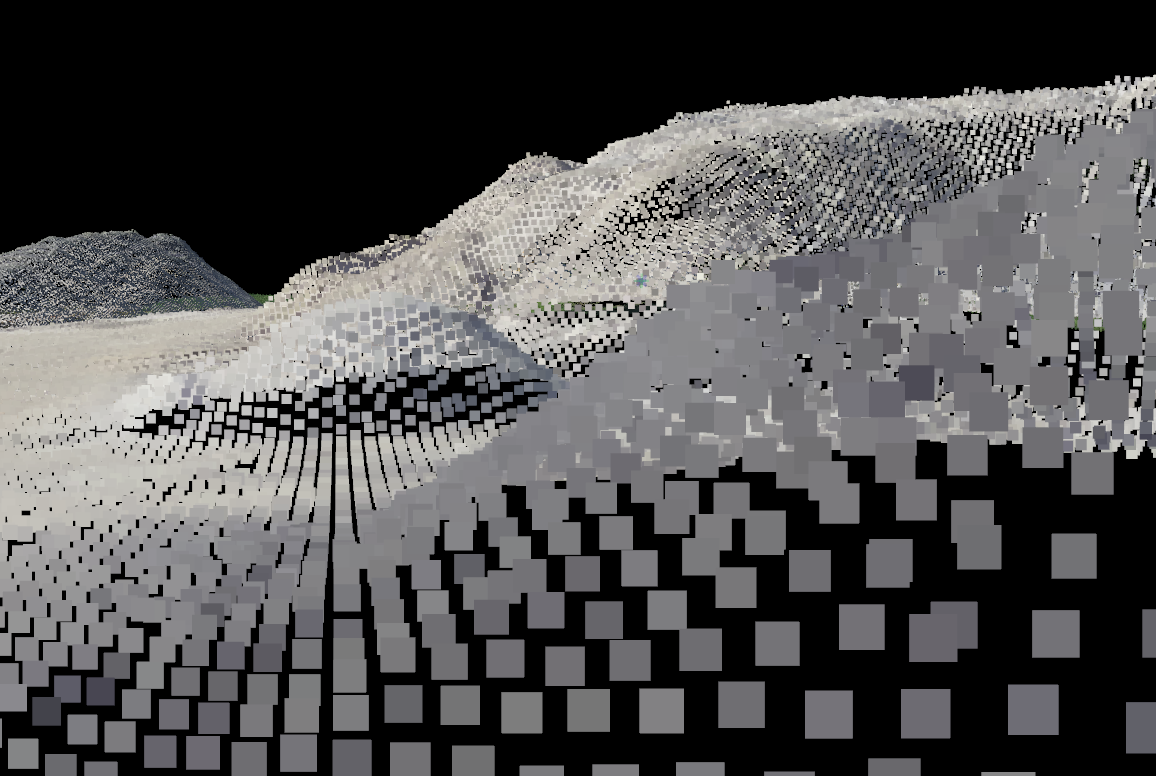
- 3D지도 - 고속/저 해상도
-
낮은 정확도와 낮은 해상도 출력으로 생성된 3D지도 탬플릿의 빠른 처리 :
- • 초기 처리 : 16배 이하의 키포인트까지. 일반적으로 덜 정확하고 덜 완전하지만 16배 더 빠르게 처리합니다.
- • 포인트 클라우드 : 16배 이하 포인트는 정확도가 감소하지만 16배 더 빠르게 처리합니다.
- • 3D 메쉬 : 10배 이하의 삼각형과 4배 이하의 해상도 질감은 4배 더 빠르게 처리합니다.
- • DSM과 오르소모자이크 : 4배 이하 해상도는 16배 더 빠르게 처리합니다.
- 3D 모델 - 고속/저 해상도
-
낮은 정확도와 낮은 해상도 출력으로 생성된 3D모델 탬플릿의 빠른 처리 :
- • 초기 처리 : 16배 이하의 키포인트는 일반적으로 덜 정확하고 덜 완전하지만 16배 더 빠르게 처리합니다.
- • 포인트 클라우드 : 16배 이하의 포인트는 정확도가 감소되지만 16배까지 더 빠르게 처리합니다.
- • 3D 메쉬 : 10배 이하의 삼각형과 4배 이하의 해상도 질감은 4배 더 빠르게 처리합니다.
- AG 수정 된 카메라 - 고속/저 해상도
-
낮은 정확도와 낮은 해상도 출력으로 생성된 Ag 수정된 카메라 탬플릿의 빠른 처리 :
- • 초기 처리 : 16배 이하의 키포인트는 일반적으로 덜 정확하고 덜 완전하지만 16배 더 빠르게 처리합니다.
- • 포인트 클라우드 : 포인트 클라우드 치밀화는 없습니다.
- • 오르소모자이크 : 4배 이하의 낮은 해상도는 16배 더 빠르게 처리합니다.
- AG RGB - 고속 / 저 해상도
-
낮은 정확도와 낮은 해상도 출력으로 생성된 Ag RGB 탬플릿의 빠른 처리 :
- • 초기 처리 : 16배 이하의 키포인트는 일반적으로 덜 정확하고 덜 완전하지만 16배 더 빠르게 처리합니다.
- • 포인트 클라우드 :16배 이하의 포인트는 정확도가 감소되지만 16배까지 더 빠르게 처리합니다.
- • 오르소모자이크 : 4배 이하의 낮은 해상도는 16배 더 빠르게 처리합니다.
- 열화상 카메라
-
열화상 반사율 지도를 생성합니다.
입력 이미지
Tau 2를 기반으로 하는 열화상 카메라를 사용하여 높은 중복의 격자 비행을 사용하여 얻어진 공중 이미지
- • FLIR Vue Pro.
- • thermoMAP.
- • 기타
출력
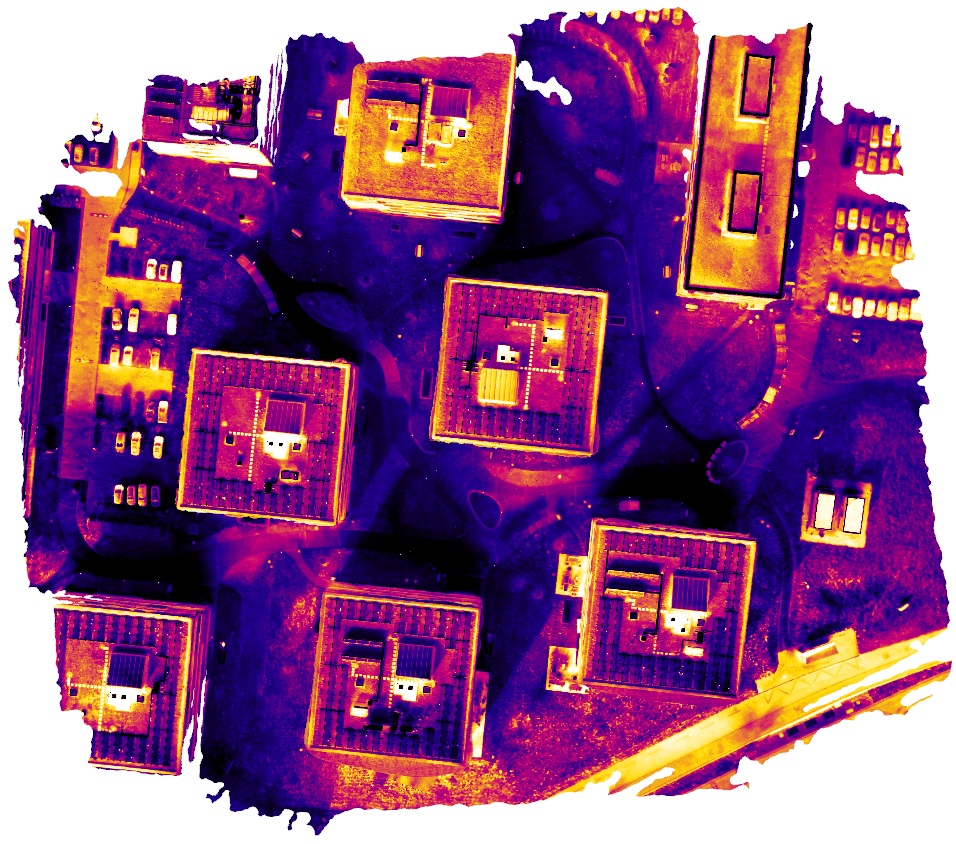
열화상 반사율 지도
적용 예 :
- • 용수 분배 지도
- • 관개 시스템 검증.
- • 태양전지 패널의 기능성
