
지원 > 지식기반 | Knowledge Base > FAQ(자주 묻는 질문)
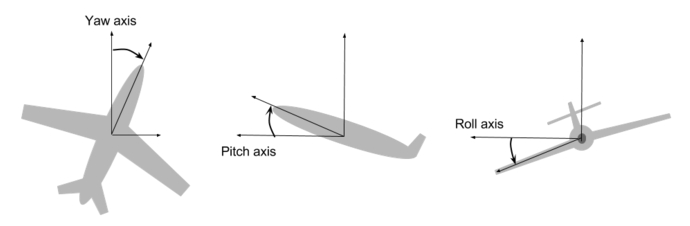
Pix4D가 요, 피치, 롤을 정의하는 방법
- 장착된 카메라가 오른쪽 날개 쪽을 가르키는 것이 x축이라고 가정한다면, y축은 꼬리쪽을 향하고 렌즈는 아래를 향하고, yaw, pitch, roll은 다음과 같이 정의됩니다.
-
-
요
- • yaw = 0°이고 카메라가 땅을 향에 있다면(즉 천저), 이미지의 상단은 북쪽을 가리킵니다.
- • yaw = 90°이고 카메라가 천저를 향해 있다면, 이미지의 상단은 동쪽을 가리킵니다.
- • yaw = 270°이고 카메라가 천저를 향해 있다면, 이미지의 상단은 서쪽을 가리킵니다.
-
피치
- • Pitch=0 이면 카메라는 아래를 향하고 있는 것입니다. (즉 천저)
- • Pitch=90이면 카메라는 앞쪽을 향하고 있는 것입니다.
-
롤
- • 짐벌을 사용한다면, 이 값은 보통 0이 됩니다.
-
더 많은 예시 :
- • yaw = 0, pitch = 0, roll = 0 은 카메라가 천저점이고(지면을 향해 수직으로 내려다 봄), 이미지의 상단이 북쪽을 향하는 것을 나타냅니다.
- • yaw = 0, pitch = 90, roll = 0 은 카메라가 드론을 기준으로 정면을 바라보고, 북쪽을 향합니다.
- • yaw = 90, pitch = 0, roll = 0 은 카메라가 천저점이고(지면을 향해 수직으로 내려다 봄), 이미지의 상단이 동쪽을 향합니다
- yaw, pitch, roll를 omega, phi, kappa로 변환하는 방법에 대한 더 많은 정보는: 205678146.
